Navigate Through Poses¶
Send the car through multiple waypoints in sequence using the Nav2 panel in RViz2.
In the previous tutorial you sent a single 2D Goal Pose. Here you will queue up several waypoints on the map and have Nav2 drive the car through all of them in order.
Before starting, make sure all previous terminals are closed. This tutorial launches everything fresh.
Steps¶
1️⃣ Start Bringup (Terminal 1)¶
Make sure the PlayStation controller is connected to the car, then open a terminal on the robot and launch the car’s sensors and drivers:
cd ~/f1tenth_ws
source /opt/ros/humble/setup.bash
source install/setup.bash
ros2 launch f1tenth_stack bringup_launch.py
Or, if you have the alias configured: bringup
Note
If Nav2 later reports Timed out waiting for transform from base_link to odom, the PlayStation controller is likely not connected. The VESC driver requires the joystick to fully initialize, and without it the odom frame is never published.
Warning
Hold R1 for autonomous mode. By default the joystick continuously publishes zero-speed commands at high priority, blocking Nav2. Hold R1 (button 5) on the PlayStation controller to enable autonomous mode — this lets Nav2’s drive commands through. Releasing R1 returns to manual joystick control.
Leave this terminal running.
3️⃣ Open RViz2¶
Open a new terminal on the RoboRacer and launch RViz2:
source /opt/ros/humble/setup.bash
rviz2
Add a Map display (Topic: /map, Durability Policy: Transient Local) to confirm the map is visible.
4️⃣ Set Initial Pose¶
Before Nav2 can navigate, AMCL needs to know where the car is on the map.
In the RViz2 toolbar, click 2D Pose Estimate
Click on the map at the car’s approximate location
Drag to set the car’s heading, then release
You should see the robot’s position update on the map. AMCL will refine the estimate as the car moves.
5️⃣ Add Path Visualization¶
In RViz2, add the following displays:
Click Add → select Path → set Topic to
/planClick Add → select Path → set Topic to
/local_planClick Add → select MarkerArray → set Topic to
/waypoints
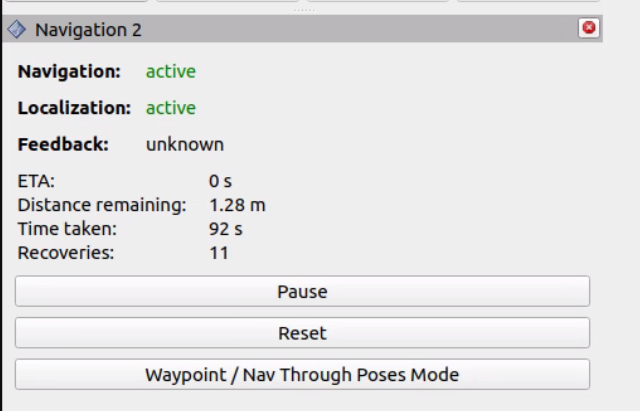
6️⃣ Add the Nav2 Panel¶
In RViz2, open Panels → Add New Panel → select Nav2 (from nav2_rviz_plugins).
A new panel will appear at the bottom of RViz2 with navigation controls.
7️⃣ Add the Nav2 Goal Tool¶
The default 2D Goal Pose button sends goals immediately. To queue waypoints, you need the Nav2 Goal tool instead.
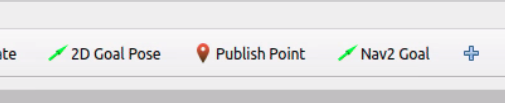
In the RViz2 toolbar, click the + button (next to the 2D Goal Pose button) to add a new tool. Select GoalTool under nav2_rviz_plugins, then click OK.
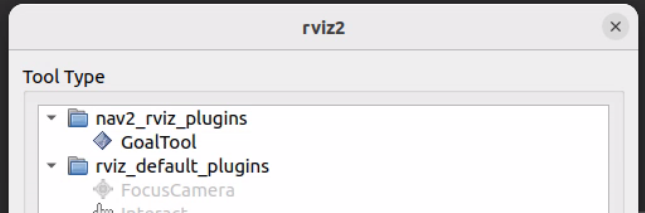
A new Nav2 Goal button will appear in the toolbar.
8️⃣ Enable Waypoint Mode¶
In the Nav2 panel at the bottom of RViz2, click the Waypoint / Nav Through Poses Mode button.
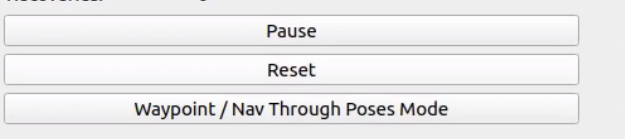
This changes the behavior of the Nav2 Goal tool — instead of sending each goal immediately, it will queue waypoints for batch navigation.
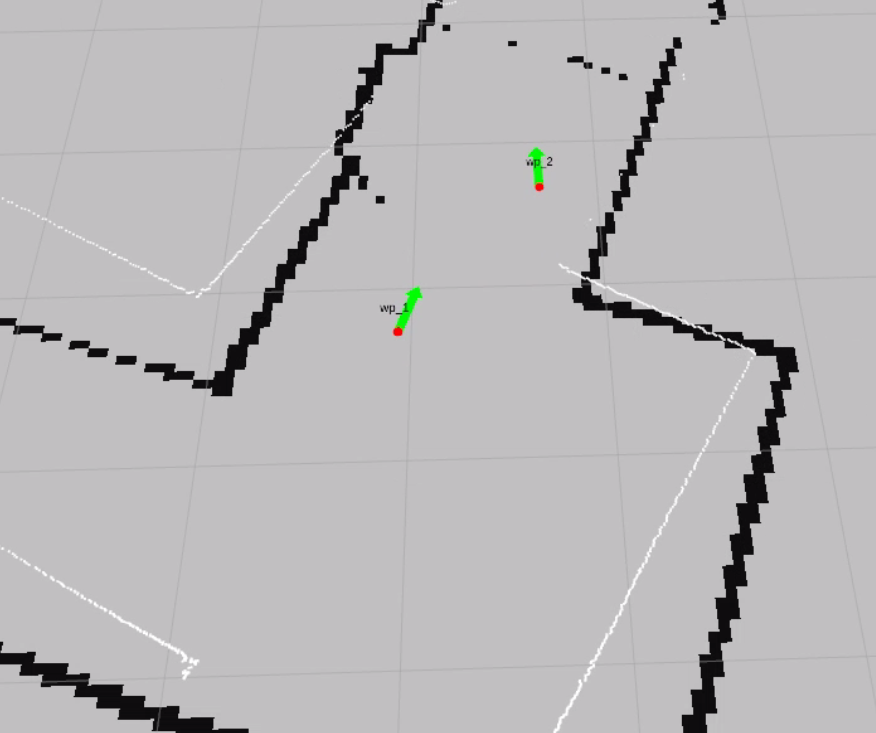
9️⃣ Set Waypoints¶
Use the Nav2 Goal tool in the RViz2 toolbar to place multiple waypoints on the map:
Click on the map at the first waypoint location, drag to set heading, release
Repeat for each additional waypoint
Each waypoint appears as a numbered marker on the map
Place 3–5 waypoints around the track to start. Each waypoint is labeled (wp_1, wp_2, etc.) on the map.
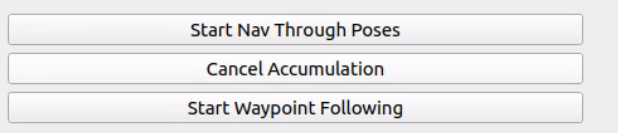
🔟 Start Navigation¶
In the Nav2 panel, click Start Nav Through Poses.
The car will begin driving through each waypoint in the order you placed them. The global planner computes a path to each waypoint in sequence, and the controller follows each path segment.
Topics¶
Topic |
Type |
Description |
|---|---|---|
|
|
Global path planned by Nav2 (updates for each waypoint segment) |
|
|
Local path the controller is currently following |
|
|
Waypoint markers shown on the map |
|
|
Velocity commands sent to the car by the controller |